Electrical and Instrumentation Engineering: Unit III: AC Rotating Machines
Different Torque of a Synchronous Motor
Salient Pole Synchronous Motor
Various torques associated with a synchronous motor
DIFFERENT TORQUE OF A SYNCHRONOUS MOTOR
Various
torques associated with a synchronous motor are as follows:
1)
Starting torque
2)
Running torque
3)
Pull in torque
4)
Pull out torque.
Starting Torque:
It
is the torque developed by the motor when full voltage is applied to its stator
winding. It is also sometimes called breakaway torque. Its value may be as low
as 10% as in the case of centrifugal pumps and as high as 200 to 250 % of full
load torque as in the case of loaded reciprocating two-cylinder compressors.
Running Torque:
It
is the torque developed by the motor under running conditions. It is determined
by the horse-power and speed of the driven machine. The peak horsepower
determines the maximum torque that would be by the driven machine. The motor
must have a break down or a maximum running torque greater than this value in
order to avoid stalling.
Pull in Torque:
A
synchronous motor is started as induction motor till it runs 2 to 5% below the
synchronous speed. Afterwards excitation is switched on and the rotor pulls
into step with the synchronously rotating stator field. The amount of torque at
which the motor will pull into step is called the pull in torque.
Pull out torque:
The
maximum torque which the motor can develop without pulling out of step or
synchronism is called pull-out torque.
Salient Pole Synchronous Motor
Cylindrical-rotor
synchronous motors are much easier to analyze than those having salient-pole
rotors. It is due to the fact that cylindrical-rotor motors have a uniform
air-gap whereas in salient pole motors, air gap is much greater between the
poles than along the poles. Cylindrical-rotor theory is reasonably accurate in
predicting the steady state performance of salient pole motors. Hence salient
pole theory is required only when very high degree of accuracy is needed or
when problems concerning transients or power system stability are to be
handled.
The
d-q currents and reactance for a salient pole synchronous motor are exactly the
same as discussed for salient pole-synchronous generator. The motor has d-axis
reactance Xd and q-axis reactance Xq. Similarly motor
armature current Ia has two components = Id and Iq.
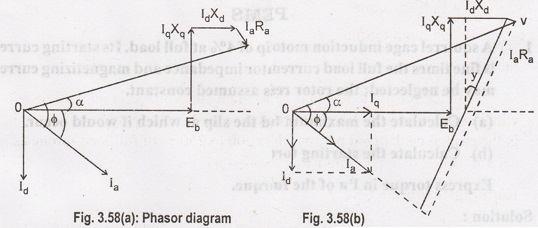
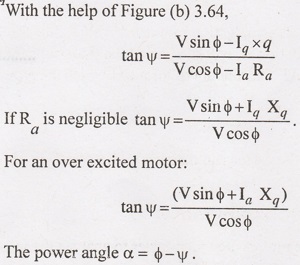
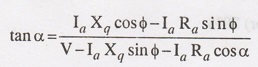
With
the help of Figure (b) 3.64,
The
magnitude of the excitation or the back emf.
Eb = V cos α – Ia Ra – Id
Xd
Similarly
for synchronous motor with Ra = 0

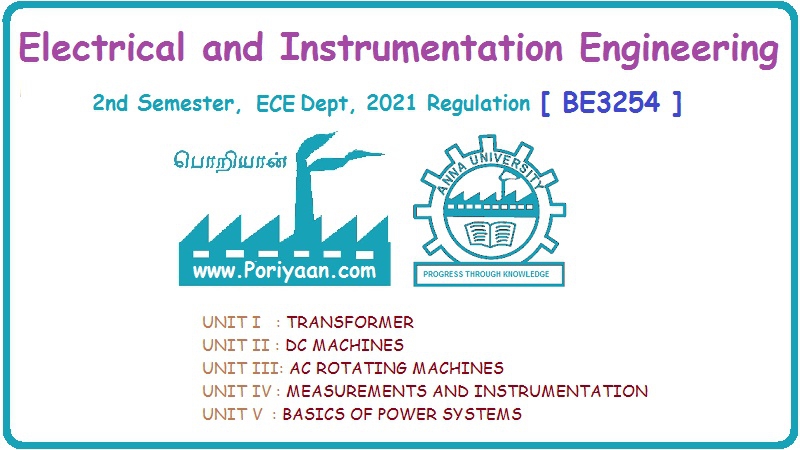
If
Ra is not negligible. It can be proved that:
Electrical and Instrumentation Engineering: Unit III: AC Rotating Machines : Tag: : Salient Pole Synchronous Motor - Different Torque of a Synchronous Motor
Related Topics
Related Subjects
Electrical and Instrumentation Engineering
BE3254 - 2nd Semester - ECE Dept - 2021 Regulation | 2nd Semester ECE Dept 2021 Regulation