Electrical and Instrumentation Engineering: Unit II: DC Machines
DC Motor Characteristics
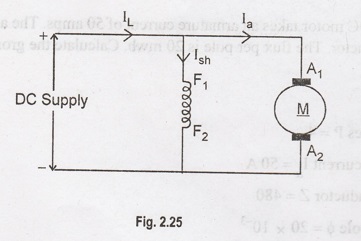
The performance of a DC motor can be determined from its characteristics curves known as motor characteristics. Following are the three important characteristics of a DC motor. Why DC series motor is always started with load?
DC MOTOR CHARACTERISTICS
The
performance of a DC motor can be determined from its characteristics curves
known as motor characteristics. Following are the three important
characteristics of a DC motor.
(i)
Torque versus Armature current characteristics (T Vs Ia) ═>Electrical Characteristics.
(ii)
Speed versus Armature current characteristics (N Vs Ia).
(iii)
Speed versus Torque characteristics (N Vs T) ═> Mechanical characteristics.
Characteristics
of DC Shunt Motor
(i) Torque Versus Armature
Current (T Vs Ia)
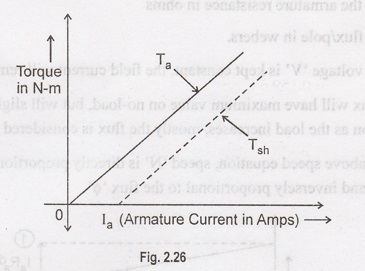
This
characteristics give the relationship between the torque and armature current
of
a
DC motor. This is known as electrical characteristics.
Torque,
Τ α φ Ia
where,
φ →
Flux of the motor, Ia → Armature current.
From
the expression for the torque of a DC motor, torque is directly proportional to
the product of flux per pole 'φ' and armature current.
Since
in case of DC shunt motor, the flux per pole 'φ' is remains constant.
Torque
increases with the increase of load current.
Torque-armature
current characteristics is a straight line passing through origin
"0".
Due
to armature reaction, friction and windage losses this torque time droops
slightly.
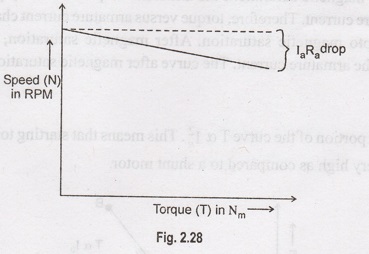
(ii) Speed Versus Armature Current
(N Vs Ea)
where,
N is the speed in rpm
Ia
is the armature current in amperes
Ra
is the armature resistance in ohms
φ
is flux/pole in webers.
If
applied voltage 'V' is kept constant, the field current will remain constant.
Hence,
flux will have maximum value on no-load, but will slightly decrease due to
armature reaction as the load increases, mostly the flux is considered to be
constant.
From
the above speed equation, speed 'N' is directly proportional to back emf (Eb)
(or) (V – Ia Ra) and inversely proportional to the flux 'φ'.
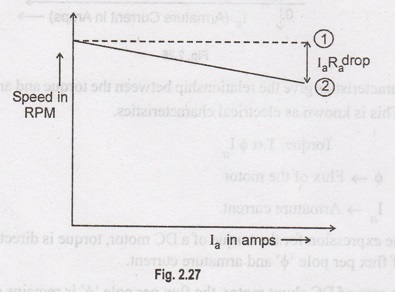
If
the flux 'φ' is constant, as armature current Ia increases, the drop
Ia Ra also increases. Thus (V – Ia Ra)
decreases, so the speed 'N' decreases.
Since
voltage drop in armature at full-load is very small as compared to applied
voltage. So the drop in speed from no-load to full-load is very small. The
dotted line, drawn parallel to the X-axis shows the level of no-load speed. The
solid line shows the actual speed versus armature current characteristics
curve.
The
% of speed change will be about 5% at full-load due to armature resistance
drop.
(iii) Speed Versus Torque Characteristics
The
points for drawing the speed (N) versus torque (T) can be obtained from speed
(N) versus armature current (Ia) and torque (T) versus armature
current (Ia).
For
example, Ia = 0, T = 0 in T Vs Ia curve and N = N0
from N Vs Ia
This
point therefore gives the first point on N Vs T characteristics as N = N0
speed when T = 0.
If
Ia increases, torque increases, but speed N decreases.
We
may say,
Ν
α 1/T
Therefore,
the N versus T characteristics plotted. This shows a slightly fall in speed
from no-load to full-load as the torque developed increase.
Conclusions:
There
is a slightly change in the speed of shunt motor from no-load to full-load.
Hence, it is a constant speed motor. The starting torque is not high, because Ta
α Ia.
Characteristics
of DC Series Motor
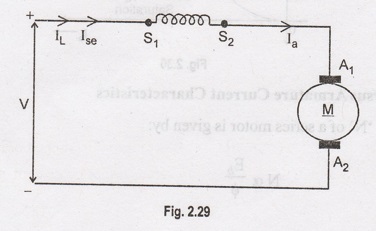
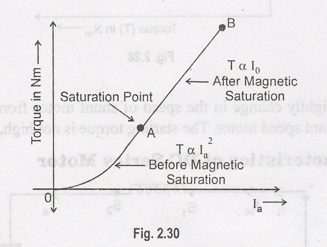
Torque Versus Armature Current
Characteristics:
Ta
α φ Ia
Upto
magnetic saturation, φ α Ia, so that
Torque
(Ta) α Ia2
After
magnetic saturation, is constant, so that
Torque
(Ta) α Ia.
Thus
upto magnetic saturation, the armature torque is directly proportional to the
square of armature current. Therefore, torque versus armature current
characteristics curves is a parabola upto magnetic saturation. After magnetic
saturation, torque is directly proportional to the armature current. The curve
after magnetic saturation is a straight line.
Conclusion:
The
initial portion of the curve Ta α Ia2. This
means that starting torque of a DC series motor will be very high as compared
to a shunt motor.
(iv) Speed Versus Armature Current
Characteristics
The
speed 'N' of a series motor is given by:
Ν
α Eb / φ
where,
Eb = V - Ia (Ra + Rse).
When
the armature current increases, the back emf decreases due to (Ra + Rse)
drop, but the flux φ increases.
However,
Ia (Ra + Rse) drop is small under normal
operating conditions. It a neglected during light load conditions
N α 1 / φ
upto
magnetic saturation
N α 1 / Ia (Ia = Ise
= IL)
Thus,
upto magnetic saturation, the N versus Ia curves follows the
hyperbolic shape.
After
saturation, the flux becomes constant and so does the speed.
Why DC series motor is always
started with load?
Speed
is inversely proportional to armature current.
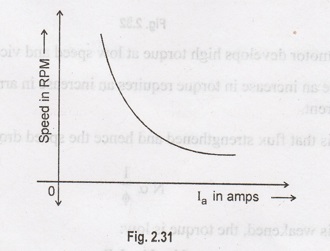
From
the characteristics curves, we can able to understand that the speed decreases
as the load on he motor increases.
At
a very low load, the speed is dangerously high. Thus, if a series motor is
allowed to run at a very light load or at no-load, its speed will become much
higher than its normal speed, which may cause damage to the motor.
For
this reason, series motors are never started on no-load and are not used in
applications where there is a chance of the load being completely removed when
the motor remains connected to the supply.
The
load on the series motors is to be connected gears and not through a belt
pulley arrangement.
(v) Speed Versus Torque
Characteristics
The
speed versus Torque characteristics of a series motor can be derived from its
speed-Armature current and Torque-Armature current characteristics as follows.
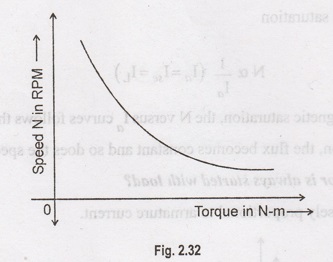
The
series motor develops high torque at low speed and vice-versa.
It
is because an increase in torque requires an increase in armature current,
which is also the field current.
The
result is that flux strengthened and hence the speed drops.
Ν
α 1 / φ
If
the flux is weakened, the torque is low:
Ν
α V - Ia Ra
If
Ia Ra drop is negligible
Ν
α V / φ
T
α φ Ia, T α Ia2, Ia2 α φ2
φ
α √T
N
α V / √T
From
the equation, we find that speed is inversely proportional to torque. Hence the
characteristics curve is hyperbolic in shape.
Characteristics of DC Compound Motor
A
compound motor has both series field and shunt field. The shunt field is always
stronger than the series field.
Compound motors are of two types:
(i)
Cummulative - Compound motors in
which series field aids the shunt field.
(ii)
Differential - Compound motors in
which series field opposes the shunt field.
So
the characteristics curves are intermediate between the shunt and series
motors.
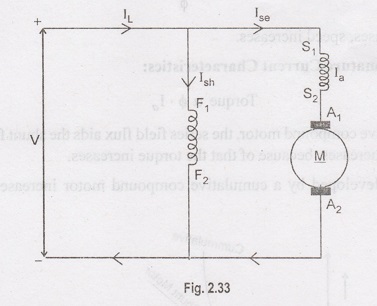
Speed Versus Armature Current
Characteristics:
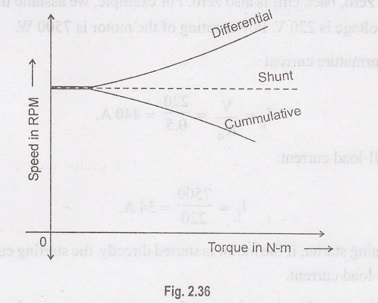
In
the case of a cummulative compound motor the N versus Ia
characteristics is slightly more drooping than that of a shunt motor as there
is increase in flux with load. As flux increases speed decreases.
↓
Ν α 1 / φ ↑
In
differential compound motor, the curve is above the shunt motor curve, because
the series field flux opposes the shunt field flux, so the net available flux
decreases.
↑
Ν α 1 / φ ↓
If
flux decreases, speed increases.
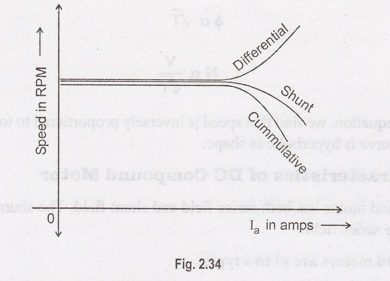
Torque Versus Armature Current
Characteristics:
Torque
α φ . Ia
In
cummulative compound motor, the series field flux aids the shunt field flux so
the net available flux increases, because of that the torque increases.
The
torque developed by a cumulative compound motor increases with sudden increase
in load.
Cummulative
compound motors are therefore suitable in situations where there is sudden
application of heavy loads like shears, punches, rolling mills, etc.
In
differential compound motor, the fluxes established by shunt and series, field
are opposite to each other. So the net available flux decreases, because of
that the torque decreases.
The
torque developed by a differential compound motor, decreases with increase in
load.
Speed-Versus Torque Characteristics
Curves:
The
speed of a differential compound motor remains more or less constant with
increase in load, but its torque decreases with load.
Since
the shunt motor also develops a speed torque and the speed does not vary 1x 21
ms and oft grille g appreciably will increases in load.
Differential
compound motors are not preferred over shunt motors and hence are rarely used.
Electrical and Instrumentation Engineering: Unit II: DC Machines : Tag: : - DC Motor Characteristics
Related Topics
Related Subjects
Electrical and Instrumentation Engineering
BE3254 - 2nd Semester - ECE Dept - 2021 Regulation | 2nd Semester ECE Dept 2021 Regulation