Electrical and Instrumentation Engineering: Unit II: DC Machines
Circuit Model of DC Machine
The parallel paths of dc machine armature are symmetrical and each has an induced emf and a resistance. The armature can be represented by the DC Machine Circuit Model with voltage and a series resistance
DC MACHINE CIRCUIT MODEL
The
parallel paths of dc machine armature are symmetrical and each has an induced
emf Ea and a resistance R. The armature can be represented by the DC
Machine Circuit Model with voltage Ea and a series resistance:
Ra
= Rp / A
as
shown in Figure 2.18. The armature resistance is quite small so as to limit the
copper- loss to an acceptable value.

Figure
2.18 also shows the field circuit of the machine and the field coil axis is placed
at 90° to the brush axis as per the actual arrangement in the machine. From
circuit point of view it is not necessary to rigidly follow this scheme. Since
most of the time steady-state dc behavior of the machine will be considered,
the inductances of field and of armature (this is negligible any way) circuits
are of no consequence and are not shown in the circuit model.
The
voltage drop at brush-commutator contact is fixed (1-2 V), independent of
armature current as the conduct on process is mainly through numerous short
arcs. However, this voltage being small is modeled as linear resistance and
lumped with Ra. From now onwards it will be assumed that Ra
includes the effect of brush voltage drop.
Generating Mode
The
machine operates in generating mode (puts out electrical power) when Ia
is in the direction of induced emf Ea as in Figure 2.19(a). For the
armature circuit:
V
(terminal voltage) = Ea – Ia Ra ; Ea
> V
The
mechanical power converted to electrical form is :
Pmech
(in)|net = Ea Ia = Pelect
(out)|gross
The
net electrical power output is:
P0
= VIa
In
actual machine this angle is 90° elect.
Also
Ea Ia – VIa = Ia2 Ra
= armature copper-loss
And
Pmech (in)|gross = shaft power = Pmech (in)|net
+ rotational loss
In this mode torque of electromagnetic origin
is opposite to the direction of rotation of armature i.e., mechanical power is
absorbed and a prime-mover is needed to run the machine.
The
conductor emf and current are also in the same direction for generating mode as
shown in the cross-sectional view of Figure 2.19(c).


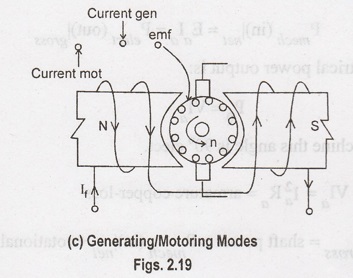
Motoring Mode
In
this mode, Ia flows in opposition to induced emf Ea as in
Figure 2.19(b). Ea is now known as the back emf to stress the fact
that it opposes the armature emf. For the armature circuit:
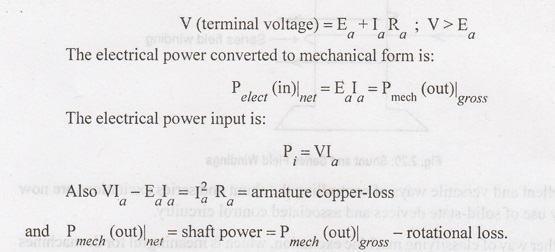
In
this mode torque of electromagnetic origin is in the direction of armature
rotation, i.e., mechanical power is put out and is absorbed by load
(mechanical). Conductor emf and current are also in opposite directions for
motoring mode as shown in Figure 2.19(c).
Electrical and Instrumentation Engineering: Unit II: DC Machines : Tag: : - Circuit Model of DC Machine
Related Topics
Related Subjects
Electrical and Instrumentation Engineering
BE3254 - 2nd Semester - ECE Dept - 2021 Regulation | 2nd Semester ECE Dept 2021 Regulation