Signals and Systems: Unit III: Linear Time Invariant Continuous Time Systems,,
Block Diagram Representation
Realization of Continuous-time Systems-(Direct Form I Realization)
The LTI system can also be represented with the help of block diagrams. Which indicates how individual calculations are performed.
BLOCK
DIAGRAM REPRESENTATION
The LTI system can also
be represented with the help of block diagrams. Which indicates how individual
calculations are performed.
Realization
of Continuous-time Systems-(Direct Form I Realization)
There are four
different types of system realization of continuous-time linear time invariant
systems.
They are:
1. Direct form-I
realization
2. Direct form-II
realization
3. Cascade form
realization
4. Parallel form
realization
Integrator
An integrator is an
element used to integrate the input signal. The transfer function of an ideal
integrator is given by

Adder
The adder is an element
used to perform the addition and subtraction of signals. Pictorially it is
represented by a small circle that has at least two input terminals and one
output terminal. The output variable is the algebraic sum of all the input
variables.

Multiplier
The multiplier is an
element used to multiply the signal by a constant. The gain can be positive or
negative.

The transfer function
of the system is
H(S) = Y(S)/X(S)
System Realization
There are different
types of system realizations. They are 1. Direct form -I realization 2. Direct
form-II realization 3. Cascade form realization 4. Parallel form realization. A
transfer function can be realized using integrators and differentiators.
However, differentiators are not used in realizing practical systems. The
reason is that differentiators amplifies high frequency noise. The integrator
suppress high frequency noise, hence only integrators are used for realization
of systems.
The transfer function
of ideal integrator is given by,
H(s) = 1/s
Below figure represents
the transfer function of an ideal integrator

Consider a system
defined by differential equation

The transfer function
of above system is,

If M > N, the system
is not causal, and the system is not physically realizable.
Therefore the value of
M must be less than or equal to N of physical realizability.
Realization of Direct form I-Structure
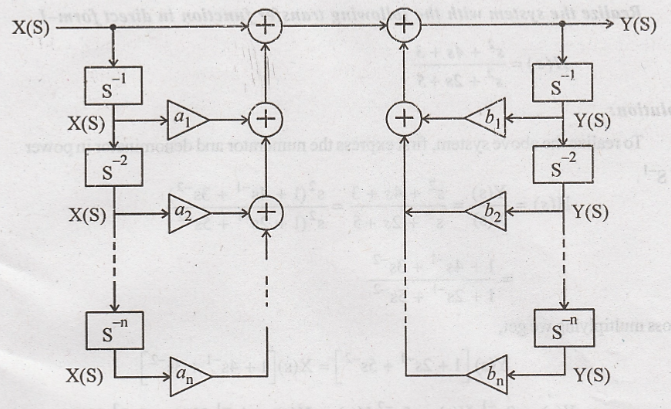
Realization of Direct form - II

Problem 1:
Realize the system with
the following transfer function in direct form-I
Solution:
To realize the above
system, first express the numerator and denominator in power of S-1.

Cross multiplying we
get,
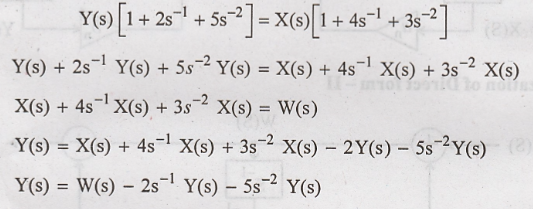


For this first we
realized W(S) as shown in figure 3.4(a) then we realized Y(S) in terms of W(S)
as shown in figure 3.4(b) combining figures 3.4(a) and 3.4(b) we get the
realization as shown in figure 3.5.
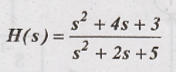
Problem 2:
Realize the system with
the following transfer function in direct form -I:

Solution:

Cross multiplying we
get,

The direct form -I
realization of Y(s) is shown in figure 3.6

Problem 3:
Realize the system described by the following differential equation in direct form-1.

Solution:
Given:

Taking Laplace
transform on both sides and neglecting initial conditions, we have
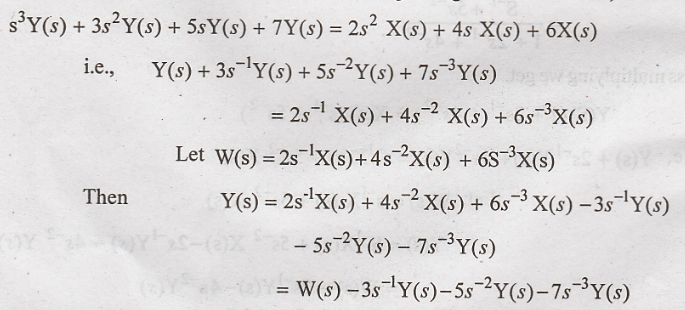
The realization of the
given transfer function in direct form -I is shown in fig. 3.7.

Signals and Systems: Unit III: Linear Time Invariant Continuous Time Systems,, : Tag: : Realization of Continuous-time Systems-(Direct Form I Realization) - Block Diagram Representation
Related Topics
Related Subjects

Signals and Systems
EC3354 - 3rd Semester - ECE Dept - 2021 Regulation | 3rd Semester ECE Dept 2021 Regulation